

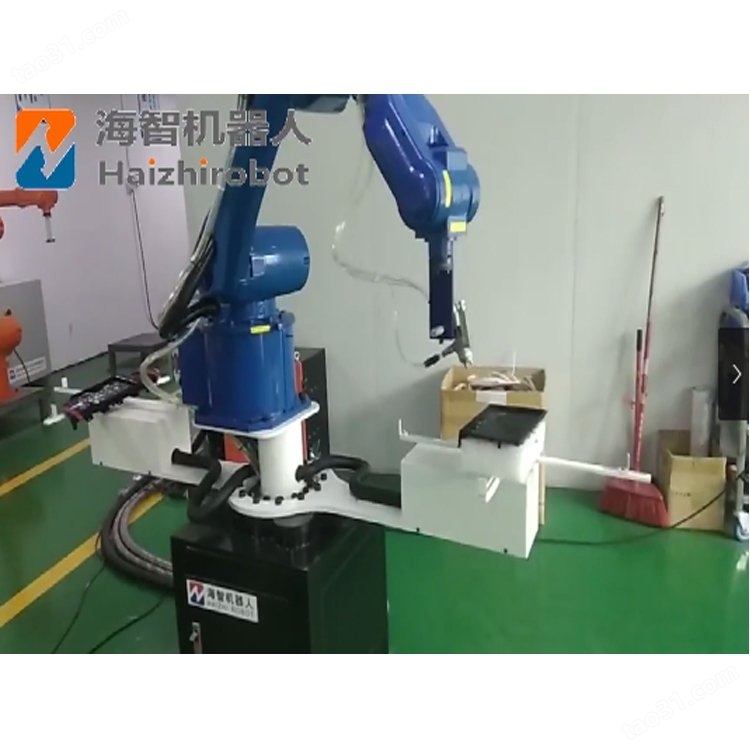



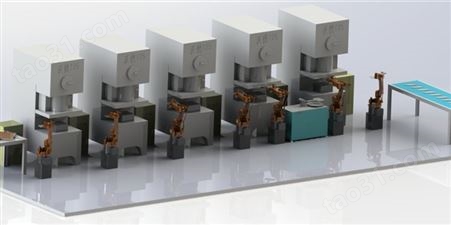
冲压机械手具有现场通信网络、现场设备互联、互动操作性、分散功能模块、开放式功能的现场总线技术是压力机控制技术的发展方向,对实现自动化具有明显推动作用。
冲压机械手压力机控制系统的集成化可通过单一操作接口实现所有压机和模具的各项控制功能,包括故障诊断、模具菜单配置、可编程限位开关和模具监控及调整等,并使设备的维修保养更加方便,而且明显增加压力机的有效工作时间。
附带冲床冲压机械手参数:
型号 | HC1400 | |
轴臂长 | 第1+2轴臂长 | 1400MM |
1臂 | 700MM | |
2臂 | 700MM | |
负载 | 10KG | |
运动速度 | 第1关节 | 120°/S |
第2关节 | 138°/S | |
第3关节 | 150°/S | |
第4关节 | 150°/S | |
循环时间 | 2.8S | |
本体重量 | 140KG | |
重复定位精度 | 第1+2关节 | ±0.08mm |
3关节 | ±0.08mm | |
4关节 | ±0.05° | |
运动范围 | 第1关节 | ±170° |
第2关节 | 正10°,负125° | |
第3关节 | 正10°,负95° | |
第4关节 | ±360° | |
电机功耗 | 第1关节 | 1500w |
第2关节 | 1000w | |
第3关节 | 750w | |
第4关节 | 400w | |
第四关节允许惯量 | 0.2KGM² | |
本体内部线缆 | 20芯 |









所有评论仅代表网友意见,与本站立场无关。